Copyright 2019 Reflux Design
Experience
Education
PhD in Mathematics and Computer Science
2023 - 2027
Australian Institute for Machine Learning (AIML), Adelaide University
Adelaide, Australia
- 3D Scene Understanding and Change Tracking
- keywords: Machine Learning, Computer Vision, Mapping
Master of Science in Robotics
2018 - 2020
National Chiao Tung University
Hsinchu, Taiwan
- RTLIO - Real-Time Tightly Coupled Lidar Inertial Odometry
- keywords: SLAM, Sensor Fusion, Robotics, Lidar, IMU
Work Experience
Associate Researcher
2020 - 2023
Industrial Technology Research Institute (ITRI)
Hsinchu, Taiwan
- - Deliver features on an automatic tool for the High-Definition(HD) map data collection. The tool helps this team gather city-scale mapping data (approximately 3000 kilometers) by a part-time driver. The features include the sensors' disconnection handler and an interactive Leaflet map viewer showing the instant location and past trajectories.
- - Researched the global accuracy criteria of HD maps. Implemented constraints using pose-graph optimization to elevate the absolute accuracy of the HD maps.
- - Implement a pose-graph optimization library using Ceres-Solver to accelerate the processes before HD maps export. The optimization helps the lidar scans match and connect pieces of scan points into a HD maps.
- - Manage, generate, and annotate the constraints used in HD maps for elevating the scan-matching quality. These maps are vital in the team's controller module and serve many purposes, like traffic light detection. I have participated in 200+ km of map production in Taiwan. Moreover, I have contributed to 130+ km on the city link in Melbourne, Australia.
Project
This section is still constructed...
More projects will be here soon.

[WACV 2026] SceneEdited: A City-Scale Benchmark for 3D HD Map Updating via Image-Guided Change Detection
keywords: Dataset, HD Map maintenance, Change Detection
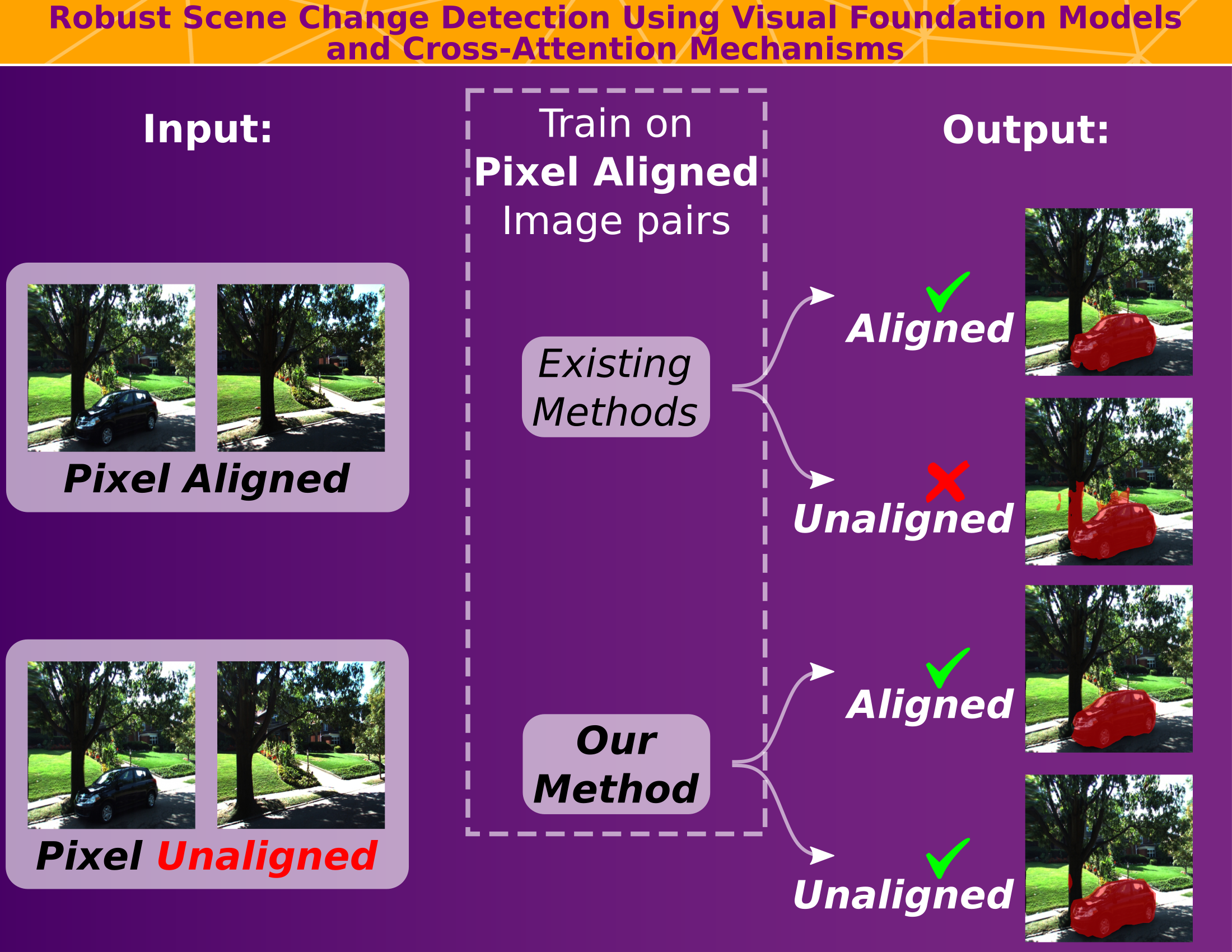
[ICRA 2025] Robust Scene Change Detection Using Visual Foundation Models and Cross-Attention Mechanisms
keywords: 2D image change detecction

[Sensors 2021] RTLIO: Real-Time LiDAR-Inertial Odometry and Mapping for UAVs
keywords: Lidar, IMU, SLAM, Sensor Fusion
Contact Me
If you have any questions or would like to get in touch, please feel free to connect or email me throught these:https://www.linkedin.com/in/chun-jung-lin/
chun-jung.lin@adelaide.edu.au